
Door Allert Jacobs
Nu de vorm van de carrosserie vast staat kan de aandrijving op verschillende manieren worden uitgevoerd.
De carrosserie is voor vier 20” wielen gemaakt dus dat staat ook al vast.
Ik kan een aantal oplossingen bedenken, met de bijbehorende voor- en nadelen, ik begin met de aandrijvingen die ik niet wil gebruiken om te eindigen met diegene die ik wel wil toepassen.
 The drive system
The drive system
Now that the shape of the body is defined the drive system can be designed in different ways.
The body is made for four 20″ wheels so that is already fixed.
I can think of several solutions that all have their pro’s and cons. I will start with the ones that I don’t want to use and end with the one I will use.

Tekening Eva Navratilova
Voorwielaandrijving
Een prima aandrijving, zo’n 65% van het gewicht rust op de vooras als je alleen en zonder bagage in de fiets zit waardoor je prima tractie zult hebben. De ketting is kort en licht en het koppel van de ketting werkt slechts in op een klein gedeelte van de carrosserie.
Maar het is technisch lastig te realiseren; sturen, aandrijven en veren op dezelfde wielen. Je hebt kruiskoppelingen of homokieneten nodig, de lengte van de assen veranderd bij het veren. De benodigde speciale onderdelen zijn duur en geven een grotere kans op storing. De ketting loopt door zijn geringe lengte erg schuin bij gebruik van een derailleur.
Met alle respect voor Miles die zijn Quattro wel voorwielaandrijving heeft gegeven en daar ook een technische uitdaging in ziet maar ik zie het niet zitten.
Front wheel drive
A good drive system, about 65% of the weight lays on the front axle if you ride alone with no luggage therefore you will have excellent traction. The chain is short and light and it only puts torque on a small part of the body.
But it is technically complicated to have the steering, driving and suspension on the same wheels.
You will need cv joints or universal joints and the length of the drive shaft varies when the suspension works. Special parts are needed which are expensive and more likely to break down. The short chain will run at an angle in certain gears if a derailleur is used.
I do appreciate the choice Miles made to use front wheel drive on his Quattro but I am not looking for that kind of technical challenge.

Tekening Eva Navratilova
Eén wielaandrijving
Ik wil dus de achterwielen aandrijven. Het eenvoudigste is het om er maar één aan te drijven.
Maar op dat ene wiel rust slechts de helft van het gewicht dat op het achterwiel van de Quest rust. En bij de Quest is de wieldruk op steile hellingen of gladde wegen soms al nauwelijks voldoende. Het aandrijven op een wiel dat niet in het midden van de fiets geplaatst is geeft ook een zeker stuur moment dat je van je rechte koers wil doen afwijken en het tegensturen geeft een (klein) wrijvingsverlies.
Een driewieler staat altijd stabiel op de drie wielen, maar een vierwieler kan met een wieltje boven een kuil komen te staan en als dat het aangedreven wiel is kom je niet meer weg. Met de DuoQuest komt dit wel eens voor maar dan kan de ander het ding nog op gang helpen, omdat elke rijder één van de achterwielen aandrijft.
One wheel drive
I want to make it a rear wheel drive. One simple solution would be to just drive one wheel.
But one wheel carries only half of the weight of the rear axle. The three wheeled Quest has barely weight on its rear wheel to coop with steep climbs or slippery roads.
To drive a wheel that isn’t placed in the center of the vehicle will make it pull to one side, a tendency that has to be corrected by counter steering and that will cause a (slight) loss of energy.
A three wheeler is always standing on all wheels, but a four wheeler can have one wheel suspended in the air above a pothole. If this is the driven wheel you will not be able to drive away. This happens every now and then with the DuoQuest but there each rear wheel is driven by one of the riders and therefor you can still drive away.
Tekening Eva Navratilova
Ketting langs de zijkant
Een krukas crankstel met een kettingblad en ketting aan de linker kant van de rijder naar achter toe, is een bijzondere oplossing.
Maar het is geen standaard crankstel en een Mountain Drive is dan niet mogelijk, terwijl door het grote blad i.v.m. 20” wielen een voor derailleur ook niet goed werkt. Het is het eenvoudigste te bouwen door direct één van de achterwielen aan te drijven en daaraan kleven de hierboven genoemde bezwaren.
Chain along the side
A crankshaft crank set like the ones used in pedal boats with the chain wheel and chain on the left side of the rider would be a special solution.
But a Mountain Drive couldn’t be used and with the large chain ring to compensate for the 20” wheels a front derailleur wouldn’t work. The most logical solution would be to drive the left wheel only but that would give you the traction problems as described above.

Tekening Eva Navratilova
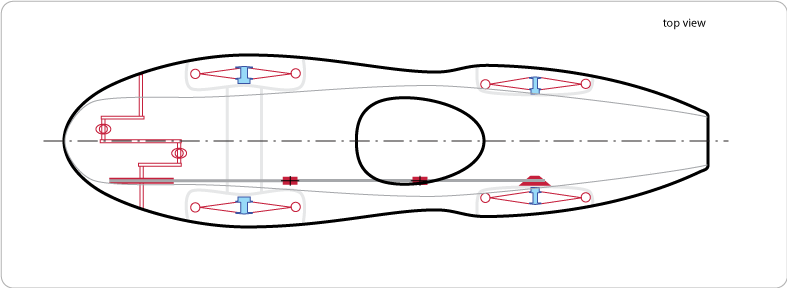
Tussenas met twee kettingen naar de achterwielen
Deze oplossing geeft de grootste bagage ruimte, zeker als de tussenas laag geplaatst wordt met een omgebouwde derailleur en een spanner voorin zoals ik in de C-Alleweder, Mango en 20” Quest heb toegepast.
Maar een tussenas gaat ten kostte van de efficiëntie van de aandrijving. Het maakt meer geluid en omgebouwde derailleur kan geen steile cassette schakelen.
Intermediate shaft and a chain to each rear wheel
This layout will leave you the largest luggage compartment especially with a modified derailleur and the shaft located as low as possible. Like I’ve designed for the C-Alleweder, Mango and 20” Quest.
But it will be less efficient with one extra shaft and two extra chains. It will be more noisy and the modified derailleur can’t shift steep cassettes.
Tekening Eva Navratilova
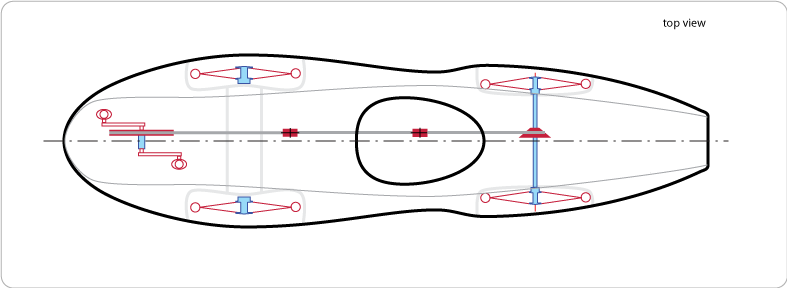
Een as door de bagageruimte
Het nadeel is duidelijk; het kost bagageruimte.
Toch kies ik hiervoor omdat ik de voordelen zwaarder vind wegen:
Twee wielaandrijving, een normale derailleur achter en een Mountain Drive is mogelijk. De efficiëntie is hoog, het maakt weinig geluid.
A drive shaft through the luggage compartment
There is clearly a disadvantage in using some of the luggage space.
Still this is the drive system of my choice.
I think the advantages are more important.
Two wheel drive, a standard rear derailleur, and the possibility to use a Mountain Drive. The efficiency is good and it is not to noisy.

Foto van trykit.com
Hoe ga ik dit uitvoeren?
Gebruik ik een vaste as zoals een trein dan wringt het in de bochten, dat is niet goed. Gebruik ik een differentieel dan is dat een zwaar ding en als één wiel grip verliest drijft het andere ook niet meer aan. Dat is lastig bij gladheid of als het binnenbocht wiel erg ‘licht’ wordt in een snel genomen bocht en doorslaat. En natuurlijk ook als één wiel in een kuil van weg of berm staat en je komt niet meer weg.
Een dubbel freewheel, op elk wiel één, lijkt mij het beste. Ik kan zelf iets maken met twee freewheelen of sperlagers maar er zijn ook dingen te koop. Een mooiste systeem dat ik kan vinden is dat van trykit.com.
How to make this?
If I would use a rigid shaft like a train the tires would rub when cornering, that is not good. If I use a differential it adds weight an if one wheel loses grip all the power goes to that wheel and not to the other wheel. That is problematic on slippery roads and in fast cornering when one wheel is lifted of the ground and spins in the air. And of course when one wheel is above a pothole or besides the road you can’t drive away.
A double freewheel, one for each wheel, seems like the best solution to me. I can make something like that myself using two freewheels of two one-way clutch bearings but these things can be bought of the shelf. The most elegant system I can find is the one made by trykit.com.

Foto van trykit.com
Bij dit dubbel freewheel systeem is er een theoretisch bezwaar dat bij het uitkomen van de bocht beide freewheelen niet ‘gelijk’ staan en je dus feitelijk slechts één wiel aandrijft. Of zou het in de praktijk zo zijn dat de altijd aanwezige minimale slip van de band op het wegdek en de vervorming van de band dit ongelijk staan van de freewheelen al snel opheft.
Ik heb het nog niet zelf kunnen testen maar heb wel deze weblog gevonden van een man die een driewielige racefiets berijdt en deze heeft omgebouwd van één wielaandrijving naar twee wielaandrijving. Lees hier het uitgebreide verslag van zijn ervaringen.
Voor mij was dit verhaal voldoende om het theoretische bezwaar ook als theoretisch te bestempelen en er van uit te gaan dat het in de praktijk op twee wielaandrijving neer komt met uitzondering van de bochten.
In de bocht steekt een ander theoretisch bezwaar de kop op. Namelijk het verzet wordt zwaarder wanneer je het binnenbochtwiel aandrijft. Dit gebeurt inderdaad en als je een heel kleine draaicirkel hebt komt het binnenbochtwiel nagenoeg stil te staan waardoor je nog maar heel moeilijk kunt rondtrappen.
Maar met een draaicirkel van een meter of elf is dit veel minder een bezwaar. Zelfs als het binnenbochtwiel los komt in de scherpst mogelijke bocht veranderd het verzet met niet meer dan 10%. De bochtstraal is dan namelijk 550 cm en de spoorbreedte 50, de achterwielen nemen wel een iets krappere bocht dan de voorwielen.
Such a double freewheel system has the a theoretical problem. After making a turn the freewheels are not synchronized, one will be engaged while the other isn’t. You will effectively be driving one wheel.
Does it work that way in the real world? Or will the ever present minimal slippage of the tire on the road make them synchronize.
I haven’t tested this myself but I found a web-log written by someone who rides a three wheeled racing bike and has just converted it from one wheel drive to two wheel dive. Read about it here.
His story convinced me that this is indeed a theoretical problem and the double freewheel makes a proper two wheel drive except when cornering.
When cornering another problem might occur; the radius covered by the inside rear wheel is smaller than the one covered by the outside wheel. While the inside wheel is the one that is driven when cornering it can almost stop turning in very tight corners and pedaling becomes difficult.
But with a tuning radius of eleven meters this problem doesn’t exist. Even in fast cornering when the inside wheel hovers above the road the gearing goes up by a maximum of 10%. The turning radius being 550 cm and the track width 50 cm.

A pedal generator to battery to four computer-controlled hub motors on four head tubes/headsets and suspension half forks might be more practical, if less efficient. Independent steering of all four wheels, powering of all four wheels, no gearing, no brakes, no steering mechanism (electronic), use of existing inexpensive components, regen, and improved (4X- 10X’s) acceleration, range, and speed are advantages, perhaps.
Hello togetherinparis,
This would be a good solution if it was primarily designed to be an electric assist vehicle. But I want to ride it without electric assist.
I know of one attempt to make a chain less electric drive, I don’t know of anything like that being commercially available.
Regards, Allert
Deze misschien: http://www.mandofootloose.com/
Hoi Allert,
Je gaat blijkbaar geen achtervering gebruiken (zo wel dan heb je de meeste nadelen van voorwielaandrijving namelijk ook). Ik neem aan dat je deze wel kent maar voor de zekerheid noem ik hem toch maar even http://www.samagaga.com/Product.aspx?ProductID=ETG02 Mogelijk is deze iets zwaarder maar wel meer dan de helft goedkoper.
Hoi Andre,
Jawel, achtervering komt er in, één voordeel t.o.v. voorwielaandrijving blijft bestaan; je hebt geen aandrijving gecombineerd met besturing op de achteras. Dat maakt het toch wel een stuk eenvoudiger. En ook die korte (schuin lopende) ketting van de voorwielaandrijving bevalt me niet.
Samagaga ken ik wel, misschien komt hun ETG er ook wel in, voorlopig ga ik eerst een rijdend frame bouwen om de wielophanging en vering te testen, daarna komt de definitieve keuze van de onderdelen. De aandrijfassen van Samagaga zijn massief zie ik op hun site, dat is wel zwaar en voor de sterkte niet nodig, je kan ze natuurlijk wel uitboren.
Groeten, Allert
Als je wel met achtervering gaat werken heb je hoogst waarschijnlijk ook kruiskoppelingen of homokineten nodig en de vering zo construeren dat je geen spline Assen nodig hebt is ook een uitdaging. Het verschil met voorwiel aandrijving is volgens mij minder groot dan je denkt.
Of je moet met een starre achteras willen gaan werken natuurlijk.
Hoi Andre,
Het wordt inderdaad een starre as, in de volgende post meer hierover.
Groeten, Allert
I have a load-carrying quad with dual freewheels and the single-wheel-drive really is not a problem. Think of it this way: if there is no slippage, one wheel drive is obviously working. Only when that wheel slips will the freewheels equalise, and obviously when there is slippage is when you actually want both wheels to drive.
More of an issue is on tight, uphill corners, where driving only the inside wheel is not enough so you get jumpy wheel slip. The drive wheel slips momentarily until the outside wheel freewheel engages, then forward motion resumes, but only for a short distance then the inside wheel slips again. This is much more oibvious if there is loose gravel, or you’re riding on gravel or grass. Unfortunately the inside of corners tends to have loose gravel.
This may not be an issue on the velomobile as the turning radius is larger and you’re unlikely to be going quite so slowly up steep hills.
Hello Mozbike,
Thank you for you down to earth comment, your experience in this matter is important to add to the theoretical discussion.
The jumpy wheel slip in tight corners seems inevitable with two wheel drive. A differential or one wheel drive would only make matters worse. The only thing that would work better then the dual freewheel in these conditions is a tadpole trike with rear wheel drive (until your rear wheel spins on the gravel that is).
But then you would loose all the benefits of the quad and you would be right back where you started.
Regards, Allert
Another extremely well constructed blog Allert !
All options considered and a compromise made to keep things as simple as possible and thus increase reliability! As a regular long-distance rider in my (modified) Quest XS I appreciate this and can easily see myself being an early convert to the 4 wheel machine. Only yesterday I participated in a 150km Audax where the cornering limits of the Q were reached on numerous occasions resulting in VERY hot brakes! I’ll be in Dronten July 17th and hope t be able to see the models if you are there?
Hello John,
I will be there, looking forward to seeing you again. Have a good trip!
Regards, Allert
Dag Allert,
Dus het wordt een 1*9 of 1*10 configuratie met mountaindrive als optie? Of zou een duo vanvoor ook niet kunnen? Typische duo van 36/53 -> 50/70(+min). Dat is hetzelfde verschil als bij de triple crankstellen die jullie nu inbouwen (zelfs ietsje lager). Lijkt je dat niet haalbaar? De aangegeven oplossing met de Schlumpf mountain drive is wel een erg dure optie…
mvg
Jonathan
Dag Jonathan,
Die Schlumpf is inderdaad duur, gelukkig spaart het weer een voor derailleur met kabel shifter en een tandwiel uit 😉
Maar met een voor derailleur gaat het echt niet.
De as van een 20″ wiel ligt laag boven de weg en als je veel kettinglengte verschil moet kunnen opvangen zoals bij de door jou voorgestelde duo of een triple heb je een lange kooi derailleur nodig. Die sleept dan bijna over het wegdek.
De triple die we nu inbouwen heeft 30-42-53 op een 26″ wiel. Afhankelijk van de maat banden die je gebruikt komt dit overeen met b.v. 44-72 op een 20″ wiel en dat is echt te veel om nog te schakelen met zowel de voor- als de achter derailleur.
Groeten, Allert
Hallo Allert,
Met de door jou gekozen configuratie drijf je altijd één achterwiel tegelijk aan. En niet twee. Je fietst namelijk nooit langdurig perfekt rechtuit, zodat door slip beide wielen weer tractie krijgen. Reden is, dat je altijd wel wat “waggelt” met de fiets. Dat doe ik in ieder geval wel een beetje, in de Quest. Het is inderdaad waar, dat als je hard door een bocht gaat en je het binnenste, aangedreven wiel optilt, je vrijwel meteen het buitenste wiel aandrijft.
Bij de Hase Kettwiesel drijf je één wiel aan. Net als bij jouw oplossing. Het is echter altijd hetzelfde wiel. Voordeel van de “Kettwiesel” constructie is echter wel de eenvoud ervan. En mogelijk meer bagageruimte. Het nadeel is echter, dat indien het aangedreven wiel het “binnenwiel” is, en als dat wiel in een snel genomen bocht loskomt, je geen aandrijving meer hebt. Daarbij zal je af en toe je banden moeten verwisselen, omdat het aangedreven wiel altijd sneller zal slijten.
groeten, Klaas.
Dag Klaas,
Precies die vraag die jij nu stelt heb ik mezelf ook gesteld. Theoretisch zou het zo kunnen zijn dat je effectief slechts één wiel aandrijft maar hoe is dat in de praktijk. Ik zelf heb daar geen ervaring mee en ben op zoek gegaan naar ervaringen op het web.
Heb je de link die in de tekst staat gevolgd en gelezen?
http://pedal-trikes.blogspot.nl/2010/09/trykit-2wd-first-impressions.html
Hier beschrijft iemand de ombouw van zijn trike van één wiel aandrijving naar twee wielaandrijving, zijn uitgebreid beschreven ervaringen geven aan dat er wel degelijk sprake is van twee wielaandrijving.
Het ‘waggelen’ van de Quest is het ritmisch bewegen van de vering op de cadans van je ronddraaiende benen, als je daarbij niet actief je stuurknuppel verdraait sturen de wielen niet. Kijk maar eens naar het spoor dat je in een dun laagje sneeuw trekt, dat is geen gegolfde maar een kaarsrechte lijn.
De Kettwiesel kan met één wielaandrijving goed functioneren omdat daar twee derde van het gewicht op de aangedreven as rust, bij de Quest en de Q4W is dat één derde en dat is zoals in de tekst al aangegeven net (niet)voldoende op een steile helling of gladde weg. Als de Q4W één wiel zou aandrijven halveer je daar de tractie mee en is die zeker onvoldoende op een helling of bij sneeuw bijvoorbeeld.
Qua bagage ruimte scheelt het ook niet heel veel als je het oplost zo als op het één wiel aandrijving tekeningetje. Doe je het zoals op het ‘ketting langs de zijkant’ tekeningetje dan heb je wel een stuk meer bagage ruimte, maar ja, dat systeem heeft ook weer zijn eigen nadelen.
Kortom het door mij gekozen systeem is een compromis, met voor en nadelen zoals alle omschreven systemen. Ik denk dat dit toch de beste keuze is voor iemand die onder de meest uiteenlopende omstandigheden wil kunnen rijden en het niet te ingewikkeld (voorwielaandrijving) wil maken.
Groeten, Allert
Ondanks je bezwaren tegen voorwielaandrijving, toch nog een (laatste) pleidooi hiervoor!
Bij auto’s hoor je zelden dat differentieels, homokineten en de assen het begeven, ik denk dat je wat dit betreft te veel beren op de weg ziet. Als voordeel van voorwielaandrijving zie ik in elk geval dat je de hele unit in een keer onder de fiets weg zou kunnen halen, om onderhoud te verrichten. (dus incl wielkasten) en dat je ook van de geleide rollen af bent. En natuurlijk meer laadruimte achter.
Hallo tetetetelacourse,
Voorwielaandrijving is een heel goede optie……………..
Maar ik wil er toch niet aan beginnen, de enige die bij mijn weten aandrijfassen, differentiëlen en homokineten, voor de fiets aanbied is Samagaga. Of dit betrouwbaar spul is weet ik niet maar erg licht is het in ieder geval niet.
Overigens gaan de homokineten van auto’s best wel eens kapot.
Een ander belangrijk nadeel van de voorwielaandrijving blijft de korte, en daardoor (te) schuin lopende ketting.
Wat onderhoud betreft, dat is niet vaak nodig.
En mocht het nodig zijn dan zijn de achteras, vering en derailleur straks van boven af bereikbaar via een deksel op de tunnel waarin ze zitten. En dat is op zijn beurt weer eenvoudig te bereiken door de kofferdeksel te openen.
Sorry, ik laat me niet op andere gedachten brengen, maar in de carrosserie past natuurlijk wel voorwielaandrijving dus wie het er zelf in wil bouwen die mag dat doen.
En als je dan toch bezig bent en je hebt eenmaal voorwielaandrijving dan is het nog maar een kleine stap naar vier wiel besturing………………….
Groeten, Allert
Hi Allert,
I keep a 2wd delta trike (Greenspeed Anura) for winter use – it has a differential and slick tyres. It is my ride of choice when we have a covering of ice and snow. I expected it to struggle as conventional wisdom says that one wheel will spin and there’ll be no drive – but in practice it has better ice/snow traction than any of the single rear wheel trikes I own.
Looking forward to your prototype hitting the road and hearing about real-world experience!
Cheers,
Rob Hague
wrhpv.com
Hello Rob,
IMHO the good traction in snow and ice is due to the weight distribution, About 70% of the weight rests on the rear axle with most delta’s. Even with a differential it is unlikely for one wheel to spin.
With the Q4W it is about 35% with just the rider and no luggage, I don’t think a differential would work very well on snow and ice then. The Q4W doesn’t have the tight turning radius of a delta therefore it works well with the dual freewheel.
I hope to build a test mule soon to test the drive system and suspension.
Regards, Allert
Hallo, Een andere fabrikant zou het geheim houden… Hebt u niet de indruk om gratis voor de concurentie gaan werken ? “Welke concurrentie ?” denkt u misschien. Vandaag, is het antwoord wel beperkt. Maar morgen ?
Waarom geen stabilisatoren zoals de kleine willetjes op de kinderfietsen om niet oomdraaien i.p.v. 4 wielen ? Een beetje zoals de V-Box en de Red Manta op mijn site.
De Quest is een super velomobiel, je nieuw project zal ook een topper worden, ik ben zeker van !
Bye
Hallo Christophe,
Je hebt wel gelijk maar als hij eenmaal klaar is kan ook iedereen hem zien. Deze blog geeft mij wel meer reden het project sneller af te maken.
Groeten, Allert
Hum… dat klopt !
Hallo, Één ven de reden om me met een vierwieler bezig te houden is de hogere veiligheid door toegenome bochtenstabiliteid. Menselijk gedrag is daarbij vaak een doorslaggevende factor. Een slippend aangedreven wiel is een zeer directe fuctionele feedback naar de rijder. Voelen wanneer één van je achterwielen minder tractie heeft in een bocht is een hele goede vorm van wennen aan en gewend blijven aan je voertuig. Bij smalle vierwielers zou enige feedbake naar de rijder zinvol kunnen zijn.
Met vr groet,
Leo Visscher
Hello Allert,
Another solution is to use an off the shelf differential for cycles from Samagaga. http://www.samagaga.com/Category.aspx?Category=DG72
You can also get drive shafts and single sided hubs from them.
You can also add a universal from them to give negative camber to the rear wheels, improve the rear aerodynamics, and increase the luggage space.
With a universal joint, if the derailler clearance is a problem you could go to a Pinion drive http://pinion.eu/en on the front and get excellent rear ground clearance together with a fantastic range of gear ratios. It seems to be an efficient system, according to their tests.
I think this combination solves all the negatives with your preferred solution and gives a state of the art drive system. It may even be possible to use one drive chain pulley rather than 2 to reduce the drive chain friction, if the drive chain pulley moved forward and backward with the seat adjustment. This would probably counter any extra friction in the Pinion drive compared to a derailed system.
Love your posts,
Aarn Tate, Leeston, NZ
Hello Aarn,
If I would use all the parts from Samagaga you’ve mentioned and the Pinion Drive too, I would opt for front wheel drive, without the derailleur the chain line would not be a problem. Then I could also implement rear wheel steering, this would be technically very interesting and if I was to build a one of I just might do that.
Although with a live axle like Miles Quattro you can save weight and complexity when using FWD. This could be easily combined with the Pinion Drive, and yes, I like that idea.
But the price of the Pinion Drive and its weight make me think twice, it adds over 1kg and € 1000 to a regular Rohloff mountain bike, o.k. with FWD your chain is shorter and about 0.5 kg lighter.
The Samagaga parts are not very light weight, the combined weight of a diff, 2 UJ axles and 2 hubs is 2,60 kg. My home made axles, hubs and Trykit dual freehub weigh 0,76 kg.
It is a tempting solution and with different priorities it would be a better choice, but I stick to my plan to use RWD, dual freewheel and a live axle. Just for its low weight and simple construction.
Regards, Allert
Hi Allert,
this is really a great project and I think it will be my choice when I will exchange my Quest one day.
Since I live in southern Germany with some quite steep hills and since I myself are not really slim (despite 80.000 Velomobile Kilometers…), I changed to Mountain Drive when I received my last Quest. After just 50km I changed back to the “normal” drive because I was so annoyed of the Mountain Drive. It’s extremely inefficient and the gear wheels create vibrations that you can feel at the sole of your foot. I really didn’t like it.
I would be glad if there would be another possibility instead of 1×9 or 1×10 chain drive plus Mountain drive. Why not use two chains and an intermediate gear? When I calculate with Excel with standard 42/53 chain rings in the front, a 17-30-17 intermediate gear and a standard 11-28 cassette I get 1000% gear range, nice smooth gear increments, the possibility to pedal up to 80km/h and still very small gears for steep mountains. No need for a Mountain Drive any more and the intermediate gear can be adapted very easily to different drivers and landscapes. And I think, it’s still more efficient than a Mountain Drive.
So since I’m sure that you have thought about this possibility too, what are the disadvantages that keep you from using this drive?
Kind regards,
Martin
Hi Martin,
My choice for the Mountain Drive is for different reasons than yours. I will hardly ever use it in the Netherlands, I will mainly use it when I cycle abroad. If you live in a hilly country you might choose the Speed Drive to go up hill with maximum efficiency in direct drive on a small chain ring and use that overdrive going down.
I have to say that I have no experience riding with a MD going up a steep hill.
I do have experience with intermediate gear systems in a velomobile, like in the early Quest, C-Alleweder, Mango and some of the B2B tandems I’ve build. What I don’t like about that option is the lower efficiency and noise. Using a intermediate drive with a 42/53 combination would increase the torque on the chain, the direct drive with the big (75) chain ring on the 20″ rear wheel reduces the torque on the chain and therefore on the whole construction of the velomobile. And I like the possibility to shift while standing still with the MD.
I have searched the web but I could not find many bad reviews on the MD, I could find one comment that said an older MD runs much smoother than a brand new one. It’s hard for me to tell if your experience with the MD should make me choose a different gear system, I think the best way to find out is to order one and try myself.
Regards, Allert
Hi Allert,
An intermediate shaft gives resistance.
A chainwheel gives resistance.
How are they related ? (aka does one have more or less?)
Greetz
Rudolf
Hi Rudolf,
Intermediate shaft and chain pulleys clearly add to resistance. The trouble is how much, it is difficult to measure such things, and without reliable test results we can only do what we think is best.
Regards, Allert
Hi Allert,
yes, get a MD and test it. I also read many positive comments and was very astonished how the MD felt. It seems that the feelings and preferences of different drivers vary quite a lot. I felt a very low efficiency in the low gear, vibrations and noise in both gears and especially hated to change cassette gears over the full range when changing the MD gear going uphill. So it’s really best make your own experiences with it. Maybe my MD was a special case? I don’t know, I never touched one since then.
A speed drive is no option for me. There I would go 95% of the time in the lower efficient gear just to have the high efficiency on steep hills.
The possibility to shift while standing might be a good thing for unexperienced drivers. But since you get used to shift down while breaking, I miss this option once every several thousand kilometers. Therefore I would not give too much thoughts about it. It’s nice to have but not really necessary.
When torque is a critical point, don’t you get the same high torque when using the low MD gear? On a 75 chain ring you should have the same chain forces in the low gear as when using a 30 chain ring (75 / 2.5). I know, that my Quest doesn’t like it when I use the 30 chain ring but sometimes it’s very nice to have it… So, concerning the torque I don’t see any advantage of the MD but maybe I missed the point?.
Regards,
Martin
Hi Martin,
I will get a MD and test it myself. I still like the option to shift while standing still, but you’re right that it is not very important because it hardly ever happens that you make an emergency stop and forget to shift down.
You are right about the torque being as high as riding on a 30t when the MD is engaged. When not engaged the torque is low because the bigger the chain wheel the closer to the pedal the chain comes and therefore the leverage of the crank is less.
With the MD engaged and the equivalent of a 30 front on a 36 rear on a 20″ wheel you have a gear with a development of 120 cm and that is a very low gear. The same 30 on 36 gear with the 26″ wheel of your Quest makes 170 cm, if you use the lower gear to raise the rpm of your cranks you will lower the torque on the chain as well.
The other possibility you proposed is not very difficult to build in to the Q4W, even if it was originaly designed to use a MD.
It could be done like this: 42 single chainring in front goes to a 3o on a mid drive just behind the seat. The mid drive carries a triple 22-32-42 and front derailleur and that drives a 10sp cassette on the rear axle. Development between 126 cm and 791 cm, if that is not enough you can add a front derailleur and a 53 to the crank set and get up to 998 cm.
Regards, Allert
I’ve got lots of mileage using MDs – I’ve used them both on unfaired trikes along with Glyde and EvoK velomobiles. I’ve found it to be a much more user-friendly configuration than the triple chainset in my Quest for riding in this part of the world.
With careful selection of ratios ‘normal’ riding is with the MD in ‘direct’, when I’m strong much of my riding is in this configuration. However I ride where we have 20% climbs and the MD lets me handle that just fine, even in a velomobile.
The advantage of the MD, in addition to the shift-whilst-stationary capability is running single ring – there is no chance of dumping the chain during a bad shift. I do have guards on both sides of the chainring to prevent chain jump on bumpy roads. I live in an area where it can be a rapid and frequent change between down, up and down again. The roads are often badly maintained. Hitting the spot to change front gear at the same time as a bad section of road can lead to a poor front shift and dropping the chain – very frustrating on a triple, never happens with the MD!
There is an efficiency loss – Daniel claimed my EvoK’s drivetrain was 10% less efficient than his, and I’d agree that mine is noticably slower on the open road compared to my test ride. But it works very, very well for the area that I specified it for. I ride in the Peak District in central England. I’ve also toured with camping gear in a velo around the coast of Devon and Cornwall – the bottom south west corner of the UK.
The gearing configuration on my velo is MD with 60t chainring and 140mm cranks and 11-36 cassette on a 26in drive wheel. Perhaps short by Nederlands standing as I can’t pedal past 32mph/50km/hr.
I am interested in the Q4W with pretty similar gearing.
Hi Rob,
Thank you for your experience based input on the MD discussion. I will use a Q4W mostly in Nederland and can do with one chainring and a 10s derailleur here, but when I go for a tour in hilly terrain I will get me a MD to try it myself. I will probably end up using the MD only for touring abroad and changing it back for a single chainring 10s configuration when I get home again.
My Quest is always on the 53 chainring, 32-11 on the rear, and I never feel the need to shift down to 42 or 30 in Nederland.
Regards, Allert
Hi Allert,
is it correct that it’s possible to mount a cassette with 36 sprocket into the Quest? I thought that 34 is the maximum. In my Quest I use 30-42-57 front and 11-34 rear. That leads to a development between 180cm and 1057cm (at tire diameter 2.040m). I still miss some more range both to low and to high gears.
With a single 42 chainring at the Q4W, a 30 to 22-32-42 mid drive and 11-36 rear I get the development you mentioned (126-791cm) at 1.519m tire diameter. The very low gears are fine but the high gears are way too low. At 100rpm in the highest gear you reach just 47km/h. No way to save momentum from the descent towards the next hill. With 42-53 in front it’s already better with develompent of 126-998cm but still the gears are lower than at my actual Quest.
What about a front triple with 42-53-65 ? I don’t know if the 65 is a problem for the front derailleur but the range has less teeth difference than on my actual 30-42-57. This would lead to a development of 126 to 1224cm. You can crawl up a steep hill with 4km/h at 41rpm which is great and you can push with 100rpm up to 74km/h which is also very fine. And within that range you have always fine gear transitions…
Kind regards,
Martin
Hi Martin,
If you want to go to extremes on the low and high gears, you can do it that way. One big advantage of derailleur shifting is the possibility to tune the gear ratio to your liking. Shifting a big 65 chain ring will not be very smooth and front derailleurs are not made to shift a bigger diameter chain ring than 53, but it can work. It will not be a shifting solution for everybody but if it works for you that is fine.
Eva has made some drawings of the configuration and we will post it today as “The dive system part 2”
We haven’t tried to mount a 36 sprocket in the Quest, but I think it should work.
Regards, Allert
Krijgt de Q4W dezelfde draaicirkel als de Quest :O?
Dag CV,
Het zal wel ongeveer hetzelfde worden, hoewel ik graag de draaicirkel wel iets kleiner wil maken door de wielkasten te optimaliseren en ook de iets kortere wielbasis draagt daar aan bij.
Groeten, Allert